
| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ÖCŲ„ęĢėXŽĄĮy(t©»ng)╩ŪųĖė├ėŗ╦ŃÖCüĒīŹ¼F(xi©żn)╚╦Ą─ęĢėX╣”─▄Ż¼ę▓Š═╩Ūė├ėŗ╦ŃÖCüĒīŹ¼F(xi©żn) ī”┐═ė^Ą─╚²ŠS╩└ĮńĄ─ūRäeĪŻ╚╦ŅÉęĢėXŽĄĮy(t©»ng)Ą─Ėą╩▄▓┐Ęų╩ŪęĢŠW(w©Żng)─żŻ¼╦³╩Ūę╗éĆ╚²ŠS▓╔ śėŽĄĮy(t©»ng)ĪŻ╚²ŠS╬’¾wĄ─┐╔ęŖ▓┐Ęų═Čė░ĄĮŠW(w©Żng)─ż╔ŽŻ¼╚╦éā░┤šš═Čė░ĄĮęĢŠW(w©Żng)─ż╔ŽĄ─Č■ŠSĄ─ Ž±üĒī”įō╬’¾w▀Mąą╚²ŠS└ĒĮŌ(ī”▒╗ė^▓ņī”Ž¾Ą─ą╬ĀŅĪó│▀┤ńĪóļxķ_ė^▓ņ³cĄ─ŠÓļxĪó ┘|(zh©¼)Ąž║═▀\äė╠žš„Ą╚Ą─└ĒĮŌ)ĪŻ
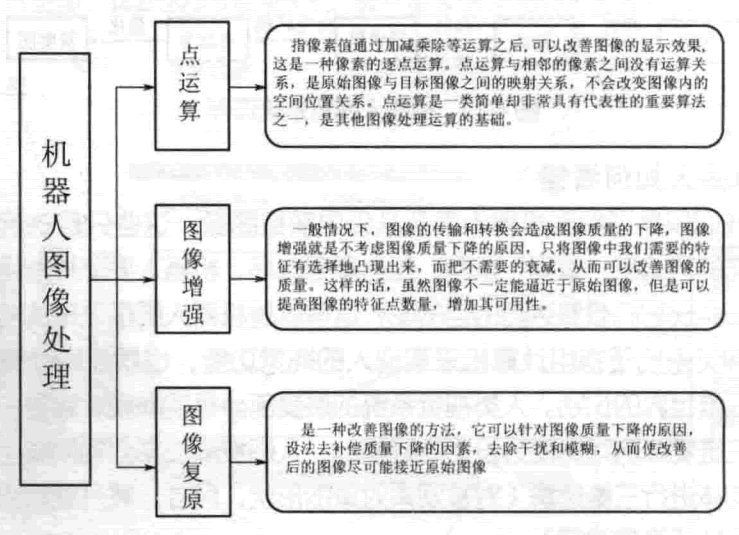
21 ╩└╝o╩Ūę╗éĆ│õØMą┼ŽóĄ─Ģr┤·Ż¼łDŽ±ū„×ķ╚╦ŅÉĖąų¬╩└ĮńĄ─ęĢėX╗∙ĄAŻ¼╩Ū╚╦ Ņɽ@╚Īą┼ŽóĪó▒Ē▀_ą┼Žó║═é„▀fą┼ŽóĄ─ųžę¬╩ųČ╬ĪŻöĄ(sh©┤)ūųłDŽ±╠Ä└Ē┐╔ęįÄ═ų·╚╦éāĖ³┐═ ė^Īó£╩┤_ĄžšJūR╩└ĮńŻ¼╚╦Ą─ęĢėXŽĄĮy(t©»ng)┐╔ęįÄ═ų·╚╦ŅÉÅ─═ŌĮń½@╚Ī3/4ęį╔ŽĄ─ą┼ŽóŻ¼ Č°łDŽ±ĪółDą╬ėų╩Ū╦∙ėąęĢėXą┼ŽóĄ─▌d¾wŻ¼▒M╣▄╚╦č█Ą─Ķbäe┴”║▄Ė▀Ż¼┐╔ęįūRäe╔ŽŪ¦ĘNŅü╔½Ż¼Ą½║▄ČÓŪķørŽ┬Ż¼łDŽ±ī”ė┌╚╦č█üĒšf╩Ū─Ż║²Ą─╔§ų┴╩Ū▓╗┐╔ęŖĄ─Ż¼═©▀^łDŽ± į÷ÅŖ╝╝ągŻ¼┐╔ęį╩╣─Ż║²╔§ų┴▓╗┐╔ęŖĄ─łDŽ±ūāĄ├ŪÕ╬·├„┴┴ĪŻ┴Ēę╗ĘĮ├µŻ¼═©▀^öĄ(sh©┤)ūųłD Ž±╠Ä└ĒųąĄ──Ż╩ĮūRäe╝╝ągŻ¼┐╔ęįīó╚╦č█¤oĘ©ūRäeĄ─łDŽ±▀MąąĘųŅÉ╠Ä└ĒĪŻ═©▀^ėŗ╦Ń ÖC─Ż╩ĮūRäe╝╝ąg┐╔ęį┐ņ╦┘£╩┤_ĄžÖz╦„ĪóŲź┼õ║═ūRäe│÷Ė„ĘN¢|╬„ĪŻ
ÖCŲ„╚╦Ą─łDŽ±╠Ä└ĒŠ═╩Ū└¹ė├ÖCŲ„╚╦Ą─Ī░┤¾─XĪ▒▀@┼_ėŗ╦ŃÖCī”ÖCŲ„╚╦Ī░┐┤ ĄĮĪ▒¢|╬„▀MąąöĄ(sh©┤)ō■(j©┤)Ęų╬÷Īó╠Ä└ĒŻ¼½@Ą├╚╦éāŽļꬥ─ĮY╣¹ĪŻī”ÖCŲ„╚╦üĒšfŻ¼özŽ±ÖC╦∙ Ī░┐┤ĄĮĪ▒Ą─łDŽ±Ż¼▀ĆāHāHų╗╩Ūę╗éĆŠžĻć╗“š▀öĄ(sh©┤)ĮMĪŻČ°ÖCŲ„╚╦ęĢėXŽĄĮy(t©»ng)Ą─ę¬Ū¾Š═╩Ū Å─łDŽ±ųą½@Ą├ėąė├Ą─ą┼ŽóŻ¼▒╚╚ńŻ¼─┐ś╦Ą─╬╗ų├ĪóŅü╔½Īó┤¾ąĪĄ╚ĪŻÖCŲ„╚╦ęĢėXŽĄĮy(t©»ng) ų„ę¬╩Ū└¹ė├Ņü╔½Īóą╬ĀŅĄ╚ą┼ŽóüĒūRäeŁh(hu©ón)Š│─┐ś╦ĪŻÖCŲ„╚╦į┌└¹ė├özŽ±Ņ^▓╔╝»łDŽ±Ą─ ▀^│╠ųąŻ¼ė╔ė┌═ŌĮńĄ─ę╗ą®▓╗┐╔▒▄├ŌĄ─Ė╔ö_ęį╝░özŽ±Ņ^▒Š╔ĒĄ─Śl╝■Ž▐ųŲŻ¼ļy├ŌĢ■ėą ę╗ą®▓╔śė▓╗Š∙ä“Īóėąš┌ō§Īó▓╗ē“ŪÕ╬·Ą╚å¢Ņ}│÷¼F(xi©żn)ĪŻ▀@ĢrŻ¼×ķ┴╦─▄ē“╠ß╚Ī│÷▒M┐╔─▄ £╩┤_Ą─╠žš„³cŻ¼▀Ćę¬▓╔╚Īę╗ą®×V▓©ĪóĘųĖŅĪó╠ß╚Ī╝╝ągĄ╚ĪŻę╗░Ńį┌łDŽ±╠Ä└ĒĄ─Ģr║“ Č╝╩Ūę¬ÄūĘNĘĮĘ©ŽÓ╗ź╚┌║Ž▓┼─▄▀_ĄĮę¬Ū¾Ż¼å╬╝ā┐┐ę╗ĘNĘĮĘ©║▄ļyĮŌøQ╦∙ėąå¢Ņ}ĪŻ
═©│Ż╦∙šfĄ─łDŽ±╠Ä└ĒŠ═╩Ū«öÖCŲ„╚╦═©▀^özŽ±Ņ^▀@ą®═ŌįO½@Ą├łDŽ±ų«║¾Ż¼└¹ė├─│ĘN╦ŃĘ©üĒ▀MąąłDŽ±ų«ķgĄ─ūāōQŻ¼ī”łDŽ±▀MąąĖ„ĘN▓┘ū„ęį▀_ĄĮ╦∙ąĶę¬īŹ¼F(xi©żn)Ą─╣”─▄ĪŻ
łDŽ±╠Ä└ĒĄ─ų„ę¬▀\╦Ńėą╚ńłD4-11╦∙╩ŠĄ─ÄūĘNų„ꬥ─ĘĮĘ©ĪŻ
³c▀\╦Ń
ųĖŽ±╦žųĄ═©▀^╝ė£p│╦│²Ą╚▀\╦Ńų«║¾Ż¼┐╔ęįĖ─╔ŲłDŽ±Ą─’@╩Šą¦╣¹Ż¼ ▀@╩Ūę╗ĘNŽ±╦žĄ─ų³c▀\╦ŃĪŻ³c▀\╦Ń┼cŽÓÓÅĄ─Ž±╦žų«ķgø]ėą▀\╦ŃĻP ŽĄŻ¼╩ŪįŁ╩╝łDŽ±┼c─┐ś╦łDŽ±ų«ķgĄ─ė│╔õĻPŽĄŻ¼▓╗Ģ■Ė─ūāłDŽ±ā╚(n©©i)Ą─ ┐šķg╬╗ų├ĻPŽĄĪŻ³c▀\╦Ń╩Ūę╗ŅÉ║åå╬ģsĘŪ│ŻŠ▀ėą┤·▒ĒąįĄ─ųžę¬╦ŃĘ© ų«ę╗Ż¼╩ŪŲõ╦¹łDŽ±╠Ä└Ē▀\╦ŃĄ─╗∙ĄAĪŻ
łDŽ±į÷ÅŖ
ę╗░ŃŪķørŽ┬Ż¼łDŽ±Ą─é„▌ö║═▐D(zhu©Żn)ōQĢ■įņ│╔łDŽ±┘|(zh©¼)┴┐Ą─Ž┬ĮĄŻ¼łDŽ± į÷ÅŖŠ═╩Ū▓╗┐╝æ]łDŽ±┘|(zh©¼)┴┐Ž┬ĮĄĄ─įŁę“Ż¼ų╗īółDŽ±ųą╬ęéāąĶꬥ─╠ž š„ėą▀xō±Ąž═╣¼F(xi©żn)│÷üĒŻ¼Č°░č▓╗ąĶꬥ─╦ź£pŻ¼Å─├µ┐╔ęįĖ─╔ŲłDŽ±Ą─ ┘|(zh©¼)┴┐ĪŻ▀@śėĄ─įÆŻ¼ļm╚╗łDŽ±▓╗ę╗Č©─▄▒ŲĮ³ė┌įŁ╩╝łDŽ±Ż¼Ą½╩Ū┐╔ęį ╠ßĖ▀łDŽ±Ą─╠žš„³cöĄ(sh©┤)┴┐Ż¼į÷╝ėŲõ┐╔ė├ąįĪŻ
łDŽ±Å═įŁ
╩Ūę╗ĘNĖ─╔ŲłDŽ±Ą─ĘĮĘ©Ż¼╦³┐╔ęįßśī”łDŽ±┘|(zh©¼)┴┐Ž┬ĮĄĄ─įŁę“Ż¼ įOĘ©╚źčaāö┘|(zh©¼)┴┐Ž┬ĮĄĄ─ę“╦žŻ¼╚ź│²Ė╔ö_║═─Ż║²Ż¼Å─Č°╩╣Ė─╔Ų ║¾Ą─łDŽ±▒M┐╔─▄ĮėĮ³įŁ╩╝łDŽ±
į┌ī”łDŽ±▀Mąą╔Ž╩÷╠Ä└Ēų«║¾Ż¼ėąĢr║“▀ĆąĶꬳDŽ±×V▓©ĪŻė╔ė┌│╔Ž±ŽĄĮy(t©»ng)Īóé„ ▌öĮķ┘|(zh©¼)║═ėøõøįOéõĄ╚Ą─▓╗═Ļ╔ŲŻ¼öĄ(sh©┤)ūųłDŽ±į┌Ųõą╬│╔Īóé„▌öėøõø▀^│╠ųą═∙═∙Ģ■╩▄ĄĮ ČÓĘNįļ┬ĢĄ─╬█╚ŠĪŻ▀@Ģr╬ęéāŠ═ąĶę¬═©▀^ę╗ą®×V▓©Ą─ĘĮĘ©īó▀@ą®╬█╚Š╚ź│²Ż¼ęįĄ├ĄĮ ŽÓī”╝āā¶Ą─łDŲ¼ĪŻ┴Ē═ŌŻ¼į┌łDŽ±╠Ä└ĒĄ──│ą®Łh(hu©ón)╣Ø(ji©”)Ż¼«ö▌ö╚ļĄ─łDŽ±ī”Ž¾▓ó▓╗╚ńŅAŽļĢrę▓Ģ■į┌ĮY╣¹łDŽ±ųąę²╚ļįļ┬ĢĪŻ ę╗░ŃŻ¼įļ┬Ģą┼╠¢┼cę¬čąŠ┐Ą─ī”Ž¾▓╗ŽÓĻPŻ¼╦³ęį¤o ė├Ą─ą┼Žóą╬╩Į│÷¼F(xi©żn)Ż¼ö_üyłDŽ±Ą─┐╔ė^£yą┼ŽóĪŻ╦∙ęįĖ∙ō■(j©┤)īŹļHŪķørŻ¼╬ęéāąĶę¬▀xō± ║Ž▀mĄ─ĘĮĘ©Ż¼ęį½@Ą├╬ęéāŽļꬥ─ĮY╣¹Ż¼▀@ąĶę¬╬ęéāį┌║▄ČÓĄ─īŹ█`ųą┐éĮYĮø(j©®ng)“ׯ¼½@ Ą├Ęe└█Ż¼▓┼─▄ū÷Ą├Ė³║├ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


