
| äōØ╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
ó┘▀h│╠ųąą─╚ßĒś (RCC) čbų├ĪŻ▀h│╠ųąą─╚ßĒśčbų├▓╗╩ŪīŹļHĄ─é„ĖąŲ„Ż¼į┌░l╔·Õe╬╗Ģr ŲĄĮĖąų¬įOéõĄ─ū„ė├Ż¼▓ó×ķÖCŲ„╚╦╠ß╣®ą▐š²Ą─┤ļ╩®ĪŻ RCC čbų├═Ļ╚½╩Ū▒╗äėĄ─Ż¼ø]ėą▌ö╚ļ║═ ▌ö│÷ą┼╠¢Ż¼ę▓ĘQ▒╗äė╚ßĒśčbų├ĪŻRCC čbų├╩ŪÖCŲ„╚╦═¾ĻP╣Ø║═─®Č╦ł╠ąąŲ„ų«ķgĄ─▌oų·čbų├Ż¼ ╩╣ÖCŲ„╚╦─®Č╦ł╠ąąŲ„į┌ąĶꬥ─ĘĮŽ“╔Žį÷╝ėŠų▓┐╚ßĒśąįŻ¼Č°▓╗Ģ■ė░ĒæŲõ╦¹ĘĮŽ“Ą─Š½Č╚ĪŻ
łD6-20╦∙╩Š×ķRCC čbų├Ą─įŁ└ĒŻ¼╦³ė╔ā╔ēKäéąįĮī┘░ÕĮM│╔Ż¼Ųõųą╝¶Ūąų∙į┌╠ß╣®ÖMé╚Ž“ ╚ßĒśĄ─═¼ĢrŻ¼īó▒Ż│ų▌SŽ“Ą─äéČ╚ĪŻīŹļH╔ŽŻ¼ę╗ĘNčbų├ų╗į┌ÖMé╚Ž“║═▌SŽ“╗“š▀į┌ÅØŪ·║═┬NŲĘĮ Ž“╠ß╣®ę╗Č©Ą─äéąį(╗“╚ßąį),╦³ąĶę¬Ė∙ō■ąĶę¬üĒ▀xō±ĪŻ├┐ĘNčbų├Č╝ėąę╗éĆĮoČ©Ą─ųąą─ĄĮųą ą─Ą─ŠÓļxŻ¼┤╦ŠÓļxøQČ©▀h│╠╚ßĒśųąą─ŽÓī”╚ßĒśčbų├ųąą─Ą─╬╗ų├ĪŻę“┤╦Ż¼╚ń╣¹ėąČÓéĆ┴Ń╝■╗“įS ČÓ▓┘ū„ąĶėąČÓéĆ RCC čbų├Ż¼▓óę¬Ęųäe▀xō±ĪŻ
RCCĄ─īŹ┘|╩ŪÖCąĄ╩ųŖA│ųŲ„Š▀ėąČÓéĆūįė╔Č╚Ą─ÅŚąįčbų├Ż¼═©▀^▀xō±║═Ė─ūāÅŚąį¾wĄ─äé Č╚┐╔½@Ą├▓╗═¼│╠Č╚Ą─▀mÅ─ąįĪŻ
RCC ▓┐╝■ķgĄ─╩¦š{ę²Ų▐DŠž║═┴”Ż¼═©▀^RCC čbų├ųą▓╗═¼ŅÉą═Ą─╬╗ęŲé„ĖąŲ„┐╔½@Ą├Ė·▐D Šž║═┴”│╔▒╚└²Ą─ļŖą┼╠¢Ż¼╩╣ė├įōļŖą┼╠¢ū„×ķ┴”╗“┴”ŠžĘ┤üĄ─RCC ĘQ IRCC(Instrument Re- mote Control Centre) ĪŻBarry Wright╣½╦ŠĄ─6▌SIRCC ╠ß╣®Ė·3éĆ┴”║═3éĆ┴”Šž│╔▒╚└²Ą─ļŖą┼╠ØŻ¼ā╚▓┐ėąū÷╠Ä┬±Ų„ĪóĄ══©×V▓©ęµęįĘ┤12╬╗öĄ─Ż▐DōQŲ„Ż¼┐╔ęį▌ö│÷öĄūų║═─ŻöMą┼╠¢ĪŻ
ó┌ų„äė╚ßĒśčbų├ĪŻų„äė╚ßĒśčbų├Ė∙ō■é„ĖąŲ„Ę┤üĄ─ą┼Žóī”ÖCŲ„╚╦─®Č╦ł╠ąąŲ„╗“╣żū„┼_ ▀Mąąš{š¹Ż¼čaāöčb┼õ╝■ķgĄ─╬╗ų├Ų½▓ŅĪŻĖ∙ō■é„ĖąĘĮ╩ĮĄ─▓╗═¼Ż¼ų„äė╚ßĒśčbų├┐╔Ęų×ķ╗∙ė┌┴”é„ ĖąŲ„Ą─╚ßĒśčbų├Īó╗∙ė┌ęĢėXé„ĖąŲ„Ą─╚ßĒśčbų├║═╗∙ė┌ĮėĮ³Č╚é„ĖąŲ„Ą─╚ßĒśčbų├ĪŻ
a. ╗∙ė┌┴”é„ĖąŲ„Ą─╚ßĒśčbų├ĪŻ╩╣ė├┴”é„ĖąŲ„Ą─╚ßĒśčbų├Ą──┐Ą─Ż¼ ę╗ĘĮ├µ╩Ūėąą¦┐žųŲ┴” Ą─ūā╗»ĘČć·Ż¼┴Ēę╗ĘĮ├µ╩Ū═©▀^┴”é„ĖąŲ„Ę┤üą┼ŽóüĒĖąų¬╬╗ų├ą┼ŽóŻ¼▀Mąą╬╗ų├┐žųŲĪŻŠ═░▓čb▓┐ ╬╗Č°čįŻ¼┴”é„ĖąŲ„┐╔Ęų×ķĻP╣Ø┴”é„ĖąŲ„Īó═¾┴”é„ĖąŲ„║═ųĖ┴”é„ĖąŲ„ĪŻĻP╣Ø┴”/┴”Šžé„ĖąŲ„╩╣ ė├æ¬ūāŲ¼▀Mąą┴”Ę┤üŻ¼ė╔ė┌┴”Ę┤ü╩Ūų▒Įė╝ėį┌▒╗┐žųŲĻP╣Ø╔ŽŻ¼Ūę╦∙ėąĄ─ė▓╝■ė├─ŻöMļŖ┬ĘīŹ ¼FŻ¼▒▄ķ_┴╦Å═ļsėŗ╦ŃļyŅ}Ż¼Ēææ¬╦┘Č╚┐ņĪŻ═¾┴”é„ĖąŲ„░▓čbė┌ÖCŲ„╚╦┼c─®Č╦ł╠ąąŲ„Ą─▀BĮė╠ÄŻ¼ ╦³─▄ē“½@Ą├ÖCŲ„╚╦īŹļH▓┘ū„ĢrĄ─┤¾▓┐ĘųĄ─┴”ą┼ŽóŻ¼Š½Č╚Ė▀Ż¼┐╔┐┐ąį║├Ż¼╩╣ė├ĘĮ▒ŃĪŻ│Żė├Ą─ĮY śŗ░³└©╩«ūų┴║╩ĮĪó▌S╝▄╩Į║═ĘŪÅĮŽ“╚²┴║╩ĮŻ¼Ųõųą╩«ūų┴║ĮYśŗæ¬ė├Z×ķÅVĘ║ĪŻųĖ┴”é„ĖąŲ„Ż¼ ę╗ ░Ń═©▀^æ¬ūāŲ¼£y┴┐Č°«a╔·ČÓŠS┴”ą┼╠¢Ż¼│Żė├ė┌ąĪĘČć·ū„śIŻ¼Š½Č╚Ė▀Ż¼┐╔┐┐ąį║├Ż¼Ą½ČÓųĖģfš{ Å═ ļs ĪŻ
b. ╗∙ė┌ęĢėXé„ĖąŲ„Ą─╚ßĒśčbų├ĪŻ╗∙ė┌ęĢėXé„ĖąŲ„Ą─ų„äė▀mÅ─╬╗ų├š{š¹ĘĮĘ©╩Ū═©▀^Į©┴ó ęįūóęĢ³c×ķųąą─Ą─ŽÓī”ū°ś╦ŽĄŻ¼ī”čb┼õ╝■ų«ķgĄ─ŽÓī”╬╗ų├ĻPŽĄ▀Mąą£y┴┐Ż¼£y┴┐ĮY╣¹Š▀ėąŽÓī” Ą─ĘĆČ©ąįŻ¼ŲõŠ½Č╚┼cözŽ±ÖCĄ─╬╗ų├ŽÓĻPĪŻ┬▌╝yčb┼õ▓╔ė├┴”║═ęĢėXé„ĖąŲ„Ż¼Į©┴óę╗éĆ╠ōöMĄ─ā╚ ▓┐─Żą═Ż¼įō─Żą═Ė∙ō■ŁhŠ│Ą─ūā╗»ī”ęÄäØĄ─ÖCŲ„╚╦▀\äė▄ē█E▀Mąąą▐š²Ż╗▌S┐ūčb┼õųąė├Č■ŠS PSD é„ĖąŲ„üĒīŹĢrÖz£y┐ūĄ─ųąą─╬╗ų├╝░Ųõ╦∙į┌ŲĮ├µĄ─āAą▒ĮŪČ╚Ż¼PSD ╔ŽĄ─│╔Ž±ųąą─╝┤×ķÖz £y┐ūĄ─ųąą─ĪŻ«ö┐ūāAą▒ĢrŻ¼PSD ╔Ž╦∙│╔Ą─Ž±×ķÖEłAŻ¼═©▀^┼cš²│Żø]ėąāAą▒Ą─┐ū╦∙│╔łDŽ±Ą─ ▒╚ ▌^ Š═ ┐╔ ½@ Ą├ ▒╗ Öz £y ┐ū ╦∙ į┌ ŲĮ ├µ Ą─ āA ą▒ Č╚ ĪŻ
c. ╗∙ė┌ĮėĮ³Č╚é„ĖąŲ„Ą─╚ßĒśčbų├ĪŻčb┼õū„śIąĶę¬Öz£yÖCŲ„╚╦─®Č╦ł╠ąąŲ„┼cŁhŠ│Ą─╬╗ū╦Ż¼ ČÓ▓╔ė├╣ŌļŖĮėĮ³Č╚é„ĖąŲ„ĪŻ╣ŌļŖĮėĮ³Č╚é„Ėą Ų„Š▀ėą£y┴┐╦┘Č╚┐ņĪó┐╣Ė╔ö_─▄┴”ÅŖĪó£y┴┐³c ąĪ║═╩╣ė├ĘČć·ÅVĄ╚ā׳cĪŻė├ę╗éĆ╣ŌļŖé„ĖąŲ„ ▓╗─▄═¼Ģr£y┴┐ŠÓļx║═ĘĮ╬╗Ą─ą┼ŽóŻ¼═∙═∙ąĶę¬ ė├ā╔éĆęį╔ŽĄ─é„ĖąŲ„üĒ═Ļ│╔ÖCŲ„╚╦čb┼õū„śI Ą─ ╬╗ ū╦ Öz £y ĪŻ ó█╣Ō└w╬╗ū╦Ų½▓Ņé„ĖąŽĄĮyĪŻłD6-21╦∙╩Š ×ķ╝»┬▌╝y┐ūĘĮŽ“Ų½▓Ņ║═╬╗ų├Ų½▓ŅÖz£yė┌ę╗¾w Ą─╬╗ū╦Ų½▓Ņé„ĖąŽĄĮyįŁ└ĒĪŻįōŽĄĮy▓╔ė├ČÓ┬Ę å╬└wé„ĖąŲ„Ż¼╣Ōį┤░l│÷Ą─╣ŌĮø1Ī┴6╣Ō└wĘų┬Ę Ų„Ż¼Ęų│╔6┬Ę╣Ōą┼╠¢▀M╚ļ6éĆå╬└wé„Ėą³cŻ¼å╬ └wé„Ėą³c═¼ĢrŠ▀ėą░l╔õ║═Įė╩š╣”─▄ĪŻé„Ėą³c×ķĘ┤╔õ╩ĮÅŖČ╚š{ųŲé„ĖąĘĮ╩ĮŻ¼Ę┤╔õ╣ŌĮø╣Ō└w░┤ę╗ Č©ĘĮ╩Į┼┼┴ąŻ¼ė╔╣╠¾wČ■śO╣▄Ļć┴ąSSPD ╣Ō├¶Ų„╝■Įė╩šŻ¼Z║¾▀M╚ļą┼╠¢╠Ä└ĒĪŻ3éĆÖz£y┬▌╝y┐ū ĘĮŽ“Ą─é„ĖąŲ„(1Īó2Īó3)Ęų▓╝į┌┬▌╝y┐ū▀ģŠēłAų▄(2Ī½3cm) ╔ŽŻ¼é„Ėą³c4Īó5Īó6Öz£y┬▌╝y ╬╗ų├Ż¼┤╣ų▒ųĖŽ“┬▌╝y┐ūĄ╣ĮŪÕF├µŻ¼é„Ėą³c2Īó3.5Īó6┼cé„Ėą³c1Īó4┤╣ų▒ĪŻ
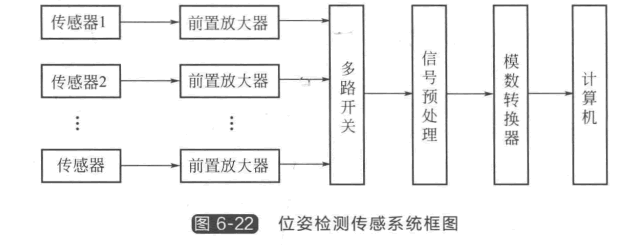
ó▄ļŖ£u┴„╬╗ū╦Öz£yé„ĖąŽĄĮyĪŻļŖ£u┴„╬╗ū╦Öz£yé„ĖąŽĄĮy╩Ū═©▀^┤_Č©ė╔é„ĖąŲ„śŗ│╔Ą─£y ┴┐ū°ś╦ŽĄ║═£y┴┐¾wū°ś╦ŽĄų«ķgĄ─ŽÓī”ū°ś╦ūāōQĻPŽĄüĒ┤_Č©╬╗ū╦ĪŻ«ö£y┴┐¾w░▓čbį┌ÖCŲ„╚╦─®Č╦ ł╠ąąŲ„╔ŽĢrŻ¼═©▀^▒╚▌^£y┴┐¾wĄ─ŽÓī”╬╗ū╦ģóöĄĄ─ūā╗»┴┐Ż¼┐╔═Ļ│╔ī”ÖCŲ„╚╦Ą─ųžÅ═╬╗ū╦Š½Č╚Öz £yĪŻłD6-22╦∙╩Š×ķ╬╗ū╦Öz£yé„ĖąŽĄĮy┐“łDĪŻÖz£yą┼╠¢Įø▀^×V▓©ĪóĘ┼┤¾Īó A/D ūāōQ╦═╚ļėŗ╦ŃÖC▀MąąöĄō■╠Ä└ĒŻ¼ėŗ╦Ń│÷╬╗ū╦ģóöĄĪŻ
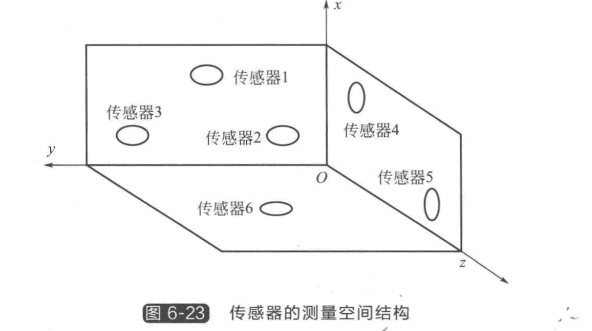
×ķ┴╦─▄ė├£y┴┐ą┼Žóėŗ╦Ń│÷ŽÓī”╬╗ū╦Ż¼ė╔6éĆļŖ£u┴„é„ĖąŲ„ĮM│╔Ą─╠žČ©┐šķgĮYśŗüĒ╠ß╣®╬╗ ū╦║═£y┴┐öĄō■ĪŻé„ĖąŲ„Ą─£y┴┐┐šķgĮYśŗ╚ńłD6-23╦∙╩ŠŻ¼6éĆé„ĖąŲ„śŗ│╔╚²ŠS£y┴┐ū°ś╦ŽĄŻ¼ Ųõųąé„ĖąŲ„1Īó2Īó3ī”欣y┴┐├µ xOy, é„ĖąŲ„4Īó5ī”欣y┴┐├µ xOz, é„ĖąŲ„6ī”欣y┴┐├µ yOz ĪŻ ├┐éĆé„ĖąŲ„į┌ū°ś╦ŽĄųąĄ─╬╗ų├╣╠Č©Ż¼▀@6éĆé„ĖąŲ„╦∙ś╦Č©Ą─£y┴┐ĘČć·Š═╩Ūįō£y┴┐ŽĄĮy Ą─£y┴┐ĘČć·ĪŻ«ö£y┴┐¾wŽÓī”ė┌£y┴┐ū°ś╦ŽĄ░l╔·╬╗ū╦ūā╗»ĢrŻ¼ļŖ£u┴„é„ĖąŲ„Ą─▌ö│÷ą┼╠¢Ģ■ļS£y ┴┐ŠÓļx│╔▒╚└²Ą─ūā╗»ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


