
| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
| äō(chu©żng)Ø╔ÖCŲ„╚╦ |
| CHUANGZE ROBOT |
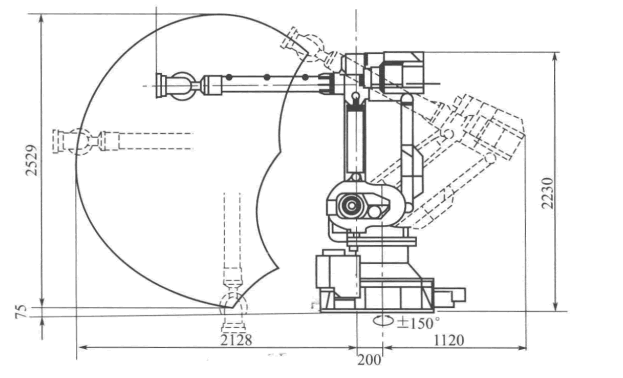
ęį│ųųž100kg, ZĖ▀╦┘Č╚4m/s Ą─┴∙▌S┤╣ų▒ČÓĻP(gu©Īn)╣Ø(ji©”)ÖCŲ„╚╦×ķ└²Ż¼ŲõęÄ(gu©®)Ė±ąį─▄╚ńłD6-1╝░ ▒Ē6-2╦∙╩ŠŻ¼▀@╩Ūę╗ĘNĄõą═Ą─³c║ĖÖCŲ„╚╦Ż¼┐╔ä┘╚╬┤¾ČÓöĄ(sh©┤)▄ć¾wčb┼õ╣żą“Ą─³c║Ėū„śI(y©©)ĪŻė╔ė┌╩╣ ė├ųąÄū║§╚½▓┐ė├üĒ═Ļ│╔ķgĖ¶×ķ30Ī½50mm Ą─┤“³c║ĖĮėū„śI(y©©)Ż¼▀\äėųą║▄╔┘─▄▀_ĄĮZĖ▀╦┘Č╚Ż¼ ę“┤╦Ż¼Ė─╔ŲZČ╠Ģrķgā╚(n©©i)ŅlĘ▒Č╠╣Ø(ji©”)ŠÓåóäėĪóųŲäėĄ─ąį─▄╩Ū▒ŠÖCūĘŪ¾Ą─ųž³cĪŻ×ķ┴╦╠ßĖ▀╝ė╦┘Č╚║═£p╦┘Č╚Ż¼į┌įO(sh©©)ėŗųąūóęŌ£p▌p╩ų▒█Ą─ųž┴┐Ż¼į÷╝ė“ī(q©▒)äėŽĄĮy(t©»ng)Ą─▌ö│÷┴”ŠžĪŻ
═¼ĢrŻ¼×ķ┴╦┐sČ╠£■║¾Ģr ķgŻ¼Ą├ĄĮĖ▀Ą─ņoæB(t©żi)Č©╬╗Š½Č╚Ż¼įōÖC▓╔ė├Ą═æTąįĪóĖ▀äéČ╚£p╦┘Ų„║═Ė▀╣”┬╩Ą─¤o╦ó╦┼Ę■ļŖÖCĪŻė╔ ė┌į┌┐žųŲ╗ž┬Ęųą▓╔╚Ī┴╦╝ėŪ░üŁh(hu©ón)╣Ø(ji©”)║═ĀŅæB(t©żi)ė^£yŲ„Ą╚┤ļ╩®Ż¼┐žųŲąį─▄Ą├ĄĮ┤¾┤¾Ė─╔ŲŻ¼50mmČ╠ŠÓļxęŲäėĄ─Č©╬╗Ģrķg▒╗┐sČ╠ĄĮ0.4s ęįā╚(n©©i)ĪŻ▒Ē6-3╩Ū┐žųŲŲ„┐žųŲ╣”─▄Ą─ę╗éĆ└²ūėĪŻįō┐žųŲŲ„ ▓╗āHŠ▀éõÖCŲ„╚╦╦∙æ¬ėąĄ─Ė„ĘN╗∙▒Š╣”─▄Ż¼Č°Ūę┼c║ĖÖCĄ─Įė┐┌╣”─▄ę▓║▄═ĻéõŻ¼▀ĆĦėą║ĖĮėŚl╝■ Ą─▀\╦Ń║═įO(sh©©)Č©╣”─▄ęį╝░┼c║ĖÖCČ©ĢrŲ„Ą─═©ą┼╣”─▄ĪŻZĮ³Ż¼³c║ĖÖCŲ„╚╦┼cCAD ŽĄĮy(t©»ng)Ą─═©ą┼╣” ─▄ūāĄ├ųžę¬ŲüĒŻ¼▀@ĘNCAD ŽĄĮy(t©»ng)ų„ę¬ė├üĒļxŠĆ╩ŠĮ╠ĪŻ
| ūįė╔Č╚ | ┴∙ ▌S | |
| │ųųž | 100kg | |
| Z┤¾╦┘Č╚ | č³╗ž▐D(zhu©Żn) | 100ĪŃs |
| ▒█Ū░║¾ | ||
| ▒█╔ŽŽ┬ | ||
| ═¾Ū░▓┐╗ž▐D(zhu©Żn) | 180ĪŃ/s | |
| ═¾ÅØŪ· | 110ĪŃ/s | |
| ═¾Ė∙▓┐╗ž▐D(zhu©Żn) | 120ĪŃ/s | |
| ųžÅ═Č©╬╗Š½Č╚ | Ī└0.25mm | |
| “ī(q©▒)äėčbų├ | ¤o╦ó╦┼Ę■ļŖÖC | |
| ╬╗ų├Öz£y | Į^ī”ŠÄ┤aŲ„ | |
┐žųŲŲ„Ą─┐žųŲ╣”─▄
| “ī(q©▒)äėĘĮ╩Į┐žųŲ▌SöĄ(sh©┤) | Š¦¾w╣▄PWM¤o╦ó╦┼Ę■┴∙▌SĪóŲ▀▌S |
| äėū„ą╬╩Į | Ė„▌S▓ÕčaĪóų▒ŠĆĪółA╗Ī▓Õča |
| ╩ŠĮ╠ĘĮ╩Į | ╩ŠĮ╠║ąļxŠĆ╩ŠĮ╠Īó┤┼ĦĪó▄ø▒P▌ö╚ļļxŠĆ╩ŠĮ╠ |
| ╩ŠĮ╠äėū„ū°ś╦ | ĻP(gu©Īn)╣Ø(ji©”)ū°ś╦Īóų▒ĮŪū°ś╦Īó╣żŠ▀ū°ś╦ |
| ┤µā”čbų├ | IC┤µā”Ų„(Ħéõė├ļŖ│ž) |
| ┤µā”╚▌┴┐ | 6000▓Į |
| ▌oų·╣”─▄ | Š½Č╚║═╦┘Č╚š{(di©żo)╣Ø(ji©”)ĪóĢrķgįO(sh©©)Č©ĪóöĄ(sh©┤)ō■(j©┤)ŠÄ▌ŗĪó═Ō▓┐▌ö╚ļ▌ö│÷Īó═Ō▓┐Śl╝■┼ąöÓ |
| æ¬ė├╣”─▄ | «É│Żį\öÓĪóé„ĖąŲ„Įė┐┌Īó║ĖĮėŚl╝■įO(sh©©)Č©ĪóöĄ(sh©┤)ō■(j©┤)Į╗ōQ |
╝╝ąg(sh©┤)╠ž³c
ó┘╝╝ąg(sh©┤)ŠC║ŽąįÅŖĪŻ╣żśI(y©©)ÖCŲ„╚╦┼cūįäė╗»│╔╠ū╝╝ąg(sh©┤)Ż¼╝»ųą▓ó╚┌║Ž┴╦ČÓĒŚīW┐ŲŻ¼╔µ╝░ČÓĒŚ ╝╝ąg(sh©┤)ŅI(l©½ng)ė“Ż¼░³└©╣żśI(y©©)ÖCŲ„╚╦┐žųŲ╝╝ąg(sh©┤)ĪóÖCŲ„╚╦äė┴”īW╝░Ę┬šµĪóÖCŲ„╚╦śŗ(g©░u)Į©ėąŽ▐į¬Ęų╬÷Īó╝ż╣Ō ╝ė╣ż╝╝ąg(sh©┤)Īó─ŻēK╗»│╠ą“įO(sh©©)ėŗĪóųŪ─▄£y┴┐ĪóĮ©─Ż╝ė╣żę╗¾w╗»Īó╣żÅSūįäė╗»ęį╝░Š½╝Ü╬’┴„Ą╚Ž╚▀M '
ųŲįņ╝╝ąg(sh©┤)Ż¼╝╝ąg(sh©┤)ŠC║ŽąįÅŖĪŻ
ó┌æ¬ė├ŅI(l©½ng)ė“ÅVĘ║ĪŻ╣żśI(y©©)ÖCŲ„╚╦┼cūįäė╗»│╔╠ūčbéõ╩Ū╔·«a(ch©Żn)▀^│╠Ą─ĻP(gu©Īn)µIįO(sh©©)éõŻ¼┐╔ė├ė┌ųŲįņĪó ░▓čbĪóÖz£yĪó╬’┴„Ą╚╔·«a(ch©Żn)Łh(hu©ón)╣Ø(ji©”)Ż¼▓óÅVĘ║æ¬ė├ė┌Ų¹▄ćš¹▄ć╝░Ų¹▄ć┴Ń▓┐╝■Īó╣ż│╠ÖCąĄĪó▄ēĄ└Į╗ ═©ĪóĄ═ē║ļŖŲ„ĪóļŖ┴”ĪóIC čbéõĪó▄Ŗ╣żĪó¤¤▓▌ĪóĮ╚┌Īóßt(y©®)╦ÄĪóę▒Į╝░ėĪ╦ó│÷░µĄ╚▒ŖČÓąąśI(y©©)Ż¼ æ¬ė├ŅI(l©½ng)ė“ĘŪ│ŻÅVĘ║ĪŻ
ó█╝╝ąg(sh©┤)Ž╚▀MĪŻ╣żśI(y©©)ÖCŲ„╚╦╝»Š½├▄╗»Īó╚ßąį╗»ĪóųŪ─▄╗»Īó▄ø╝■æ¬ė├ķ_░l(f©Ī)Ą╚Ž╚▀MųŲįņ╝╝ąg(sh©┤)ė┌ę╗¾wŻ¼═©▀^ī”▀^│╠īŹ╩®Öz£yĪó┐žųŲĪóā×(y©Łu)╗»Īóš{(di©żo)Č╚Īó╣▄└Ē║═øQ▓▀Ż¼īŹ¼F(xi©żn)į÷╝ė«a(ch©Żn)┴┐Īó╠ßĖ▀┘|(zh©¼) ┴┐ĪóĮĄĄ═│╔▒ŠĪó£p╔┘┘Yį┤Ž¹║─║═Łh(hu©ón)Š│╬█╚ŠŻ¼╩Ū╣żśI(y©©)ūįäė╗»╦«ŲĮĄ─ZĖ▀¾w¼F(xi©żn)ĪŻ
ó▄╝╝ąg(sh©┤)╔²JĪŻ╣żśI(y©©)ÖCŲ„╚╦┼cūįäė╗»│╔╠ūčbéõŠ▀éõŠ½╝ÜųŲįņĪóŠ½╝Ü╝ė╣żęį╝░╚ßąį╔·«a(ch©Żn)Ą╚ ╝╝ąg(sh©┤)╠ž³cŻ¼╩Ū└^äė┴”ÖCąĄĪóėŗ╦ŃÖCų«║¾Ż¼│÷¼F(xi©żn)Ą─ČÓ├µčė╔ņ╚╦Ą─¾w┴”║═ųŪ┴”Ą─ą┬ę╗┤·╔·«a(ch©Żn)╣ż Š▀Ż¼╩ŪīŹ¼F(xi©żn)╔·«a(ch©Żn)öĄ(sh©┤)ūų╗»Īóūįäė╗»ĪóŠW(w©Żng)Įj(lu©░)╗»ęį╝░ųŪ─▄╗»Ą─ųžę¬╩ųČ╬ĪŻ
 |
| ÖCŲ„╚╦Ąū▒P Disinfection Robot Ž¹ČŠÖCŲ„╚╦ ųvĮŌÖCŲ„╚╦ ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ╔╠ė├ÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ųŪ─▄Ę■äšÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ š╣ÅdÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P Š▀╔ĒųŪ─▄Į╠ė²ÖCŲ„╚╦ ųŪ─▄┼õ╦═ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ |


