

ųŪ─▄░▓Ę└č▓ÖzÖCŲ„╚╦╩Ūę╗ĘNų„ę¬ė├ė┌č▓▀ēĪóĘ┼╔┌ĪóĘ└▒IĪóĘ└╗Ą╚Ą─ČÓ╣”─▄ÖCŲ„╚╦ĪŻZįńĄ─▒Ż░▓ ÖCŲ„╚╦╩Ū├└ć°Denning ╣½╦ŠįOėŗĄ─Denning Sentry ĪŻ2008 ─ĻŻ¼▒▒Š®ŖW▀\Ģ■ę▓╩╣ė├┴╦╝ė─├ ┤¾Ą─░▓Ą┬¶ö╦╣F6A ą═▒Ż░▓ÖCŲ„╚╦Ż¼╦³╩Ū─┐Ū░╩└Įń╔ŽZŽ╚▀MĄ─▒Ż░▓ÖCŲ„╚╦ų«ę╗Ż¼╦³┐╔ęįė├ ė┌Ė„ĘNÅ═ļsĄžą╬Ą─┼┼▒¼ĪŻ F6A Š▀ėą│÷▒ŖĄ─┼└Ų┬║═┼└śŪ─▄┴”Ż¼─▄ņ`╗ŅĄžūźŲą╬ĀŅĖ„«ÉĪó▓╗ ═¼ö[Ę┼╬╗ų├║═ĘĮ╬╗Ą─Žėę╔╬’ŲĘŻ¼ę▓┐╔ęį▀hŠÓļx║═▀B└mĄžõNܦ▒¼š©╬’ŲĘĪŻ╦³▀Ć┼õ┴╦┐╔▀b┐ž Ą─▓╩╔½özŽ±ÖCŻ¼┐╔ęį128▒ČĘ┼┤¾║═┤_▒Żė^▓ņ¤o╦└ĮŪĪŻ┤╦═ŌŻ¼╦³┐╔ęįūźŲųž▀_80kg Ą─▒¼š©╬’Ż¼ū÷│÷Ė„ĘN╚╦ąį╗»Ą─äėū„Ż¼▓óŪę─▄┼c╚╦Į╗šäĪŻ
├└ć°Zą┬ķ_░lĄ─▒Ż░▓ÖCŲ„╚╦ Rovio ┐╔ęįÄ═ų·Įø│Ż═Ō│÷ėų▓╗Ę┼ą─╝ęųą╬’ŲĘĄ─╚╦ĪŻ Rovio ▓╔ė├╚²▌å║═GPS ŽĄĮyŻ¼ė├æ¶┐╔ęįįOČ©ÄūéĆ³cŻ¼╦³Š═Ģ■į┌╝ęųąüĒ╗žĄžč▓▀ēŻ¼╚ńłD4.1(a) ╦∙╩ŠĪŻRovio čbėąözŽ±Ņ^║═¹£┐╦’Lė├ė┌╠Į▓ķĘ┐╬▌ā╚Ą─ŪķørŻ¼│²┤╦ų«═ŌŻ¼╦³▀Ć░▓čbėą LED ¤¶Ż¼ęį▒Ńę╣═Ē─▄Ė³ŪÕ╬·Ąž┐┤ŪÕų▄ć·ŁhŠ│ĪŻė╔ė┌özŽ±Ņ^░▓čbį┌┐╔╔ņ┐sĄ─ÖCąĄ╩ų╔ŽŻ¼╦∙ęį╬▌ ų„┐╔ęį┐žųŲözŽ±Ņ^Å─Ū░║¾ū¾ėę▓╗═¼Ą─ĮŪČ╚▀Mąąė^▓ņĪŻ Rovio ═©▀^ WiFi ┬ōŠWŻ¼╬▌ų„╩╣ė├╩ų ÖC╗“š▀ėŗ╦ŃÖC╝┤┐╔▀h│╠▀b┐žĪŻ╚š▒Šę╗╝ę╣½╦ŠZĮ³ķ_░l┴╦ę╗┐Ņ▒Ż░▓ÖCŲ„╚╦Ż¼╦³čbėąą┬ą═é„ ĖąŲ„Ż¼┐╔ęįūįäėĄž░l╔õŠWĀŅ╬’īóĖ`┘\╠ūūĪŻ¼▓óīó¼Fł÷Ą─łDŽ±░lĄĮų„╚╦Ą─╩ųÖC╔ŽŻ¼╚ń łD4 . 1(b) ║═łD4. 1(c) ╦∙╩ŠĪŻį┌├└ć°ą┬Ø╔╬„ų▌Ą─ę╗╝ę╣½╦Š└’Ż¼ ę╗┼_SR2 ą═╩ęā╚▒Ż░▓ÖCŲ„ ╚╦├┐╠ņČ╝Ģ■į┌╣½╦Š┤¾śŪā╚¬MšŁĄ─▀^Ą└ųąč▓▀ēĪŻ╦³╩Ūę╗┼_ąĪ▄ć╩ĮÖCŲ„╚╦Ż¼ų╗ę¬░l¼Fėą¤¤ņF ╗“ŠÓŲõ30m ęįā╚ėąąą╚╦Ż¼╦³Š═Ģ■Ž“ųĖō]ųąą─Ą─ųĄ░Ó╚╦åT░l│÷Š»ł¾ĪŻ SR2 ą═╩ęā╚▒Ż░▓ÖCŲ„ ╚╦╩ŪCybermotion ╣½╦Š×ķØMūŃ├└▄Ŗ║¾Ū┌▓┐ķTĄ─Ų╚ŪąąĶŪ¾Č°čąųŲĄ─ĪŻŲõĖ─▀Mą═╩Ū MDARS-I ÖCŲ„╚╦Ż¼MDARS-I Ą─ZĄ═╦┘Č╚×ķ3km/h, ę╗┤╬│õļŖ║¾┐╔▀B└mĄž╣żū„8ąĪĢrŻ¼╦³ ┐╔ęįį┌360ĪŃĄ─ĘČć·ā╚░l¼F10m ▀hĄ─╬’¾wĪŻįōÖCŲ„╚╦čbėą╚ļŪųš▀╠Į£yė├╬ó▓©└ū▀_Īó¤ß│╔Ž± āxĪóę¶Ēæé„ĖąŲ„ĪóözŽ±ÖCĪó╝t═Ōšš├„Ų„Īóą²▐D╝░āAą▒ŲĮ┼_Ż¼╦³▀Ćėą│¼┬Ģ▓©é„ĖąŲ„Īóī¦║Įé„Ėą Ų„Īó¤oŠĆŠųė“ŠWĮj▐DĮėŲ„Ą╚ĪŻ«ö╣żū„╚╦åTŽ┬░Ó║¾Ż¼įōÖCŲ„╚╦╚į╚╗┐╔ęįį┌é}Äņā╚č▓▀ēĪŻ┤╦ ═ŌŻ¼╦³▀Ć┐╔ęį┤_Č©╦∙┤µ╬’ŲĘĄ─ĀŅør╝░╬╗ų├Ż¼░l¼Få¢Ņ}╝░Ģr░l│÷Š»ł¾ĪŻ
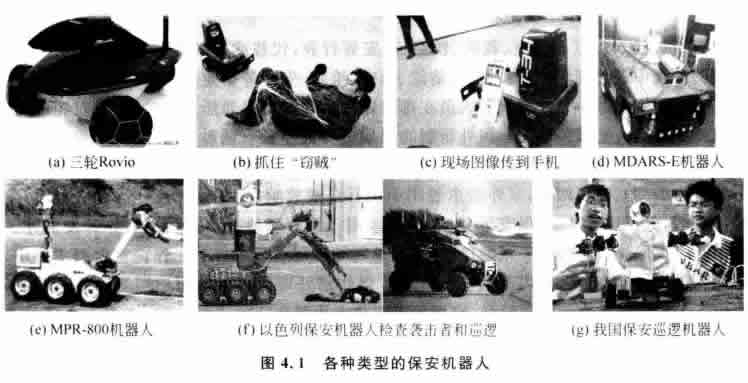
├└ć°ÖCŲ„╚╦ŽĄĮy╝╝ąg╣½╦Šš²į┌čąųŲę╗ĘN╩ę═Ōą═▒Ż░▓ÖCŲ„╚╦ MDARS-E, ╚ńłD4 . 1(d) ╦∙╩ŠĪŻįōÖCŲ„╚╦┐╔ęįūRäe║═└@▀^šŽĄK╬’Ż¼╚¶└@▓╗▀^╚źŠ═Ģ■═ŻŽ┬üĒ═©ų¬┐žųŲšŠė├æ¶ĪŻ╦³┼õ ėą┴ó¾wözŽ±ÖCĪó╝t═ŌözŽ±ÖCĪóČÓŲš└š└ū▀_Īó╝ż╣ŌÆ▀├ĶāxĪó│¼┬Ģ▓©é„ĖąŲ„Īó╬ó▓©╝░╣Ō└|═©ą┼ŠW ĮjĪóęĢŅlś╦║×ķåūxŲ„Īóī¦║Įé„ĖąŲ„(▓ŅĘųGPS ŽĄĮyĪó═ė┬▌āxĪóāAą▒āxĪó4▌åŠÄ┤aŲ„╝░±{±éČ© ╬╗é„ĖąŲ„)Ą╚ĪŻMDARS-E į┌ųĄ░ÓĢr┐╔ęįūįų„Ąž▀Mąą▒OęĢŻ¼░l¼F╚ļŪųš▀╗“«É│ŻŪķørĢrŻ¼ęĢ Ņlµ£┬ĘūįäėåóäėŻ¼ÖCŲ„╚╦┐žųŲŲ„Ģ■ėøõøŽ┬ę¶Ēæ▓ó▀MąąęĢŅlŠ»ł¾Ż¼▒Ż░▓╚╦åT┐╔ęįį┌▀h╠Äė^ ▓ņ¼Fł÷Ą─ŪķørŻ¼╗“┼c╚ļŪųš▀ī”įÆĪŻ
1993─Ļ│§Ż¼├└ć°░l╔·┴╦Ēf┐ŲŪfł@ą░Į╠░ĖĪŻ×ķ┴╦┼¬ŪÕ│■Į╠═ĮéāĄ─╗ŅäėŻ¼├└ć°┬ō░Ņš{▓ķ Šų╩╣ė├┴╦3┼_STV ÖCŲ„╚╦║═ AndrosVA ą═ÖCŲ„╚╦╝░ Andros MarkVIA ą═ÖCŲ„╚╦ĪŻŲõ ųą Ż¼STV ÖCŲ„╚╦╩Ūę╗ĘN▓╔ė├¤oŠĆļŖ╝░╣Ō└|═©ą┼Ą─6▌å▀b┐ž▄ćĪŻ▀b┐ž▄ć╔Žėąę╗éĆ┐╔ęį╔²Ė▀ ĄĮ4 . 5m Ą─ų¦╝▄Ż¼╔Ž├µčbéõėą▓╩╔½┴ó¾wözŽ±ÖCĪóĢāė├├ķ£╩Š▀Īó╬ó╣Ōę╣ęĢ├ķŠ▀ĪóļpČ·ę¶Ņl╠Į£y Ų„Īó╗»īW╠Į£yŲ„ĪóąląŪČ©╬╗ŽĄĮyĪó─┐ś╦Ė·█Öė├Ą─Ū░ęĢ╝t═Ōé„ĖąŲ„Ą╚ĪŻįō▄ćāHąĶę╗├¹▓┘ū„╚╦ åTŻ¼▀b┐žŠÓļx▀_10km ĪŻį┌─Ū┤╬ąąäėųąŻ¼▓┘ū„╚╦åT▀b┐žÖCŲ„╚╦ąą±éĄĮŠÓĒf┐ŲŪfł@500ČÓ├ū Ą─ĄžĘĮ═ŻŽ┬üĒŻ¼╔²Ų▄ć╔ŽĄ─ų¦╝▄Ż¼└¹ė├özŽ±ÖC║═╝t═Ō╠Į£yŲ„Ž“Ūfł@ĖQ╠ĮŻ¼┬ō░Ņš{▓ķŠųĄ─╣┘ åTéāć·ų°’@╩ŠŲ┴ė^▓ņé„ĖąŲ„░l╗žĄ─łDŽ±Ż¼Š═░čŪfł@╬▌└’Ą─╗Ņäė┐┤Ą├ę╗ŪÕČ■│■┴╦ĪŻ
├└ć°Ą─ę╗╝ę╣½╦Šš²į┌čąųŲę╗ĘNČÓė├═Š▒Ż░▓ÖCŲ„╚╦MPR-800, ╦³┐╔ė├ė┌Æ▀└ūĪó£ń╗Īó║╦ ╔·╗»╬█╚ŠŪÕ│²Ą╚ČÓĒŚ╬ŻļU╣żū„Ż¼╚ńłD4.1(e) ╦∙╩ŠĪŻęį╔½┴ąĄ─▒Ż░▓ÖCŲ„╚╦ę▓ĘŪ│ŻŽ╚▀MŻ¼│² ┴╦┐╔ęįÖz▓ķ┐ų▓└ęuō¶š▀═ŌŻ¼▀Ć┐╔ęį▒ŻšŽ’wÖC┼▄Ą└Ą─░▓╚½Ż¼╚ńłD4.1(f)╦∙╩ŠĪŻČĒ┴_╦╣čąųŲ Ą─Dę╗éĆ▒Ż░▓ÖCŲ„╚╦ęčė┌2007─Ļ6į┬ķ_╩╝š²╩Įį┌▒╦Ā¢─Ę╩ąĮųŅ^č▓▀ēŻ¼įō▒Ż░▓ÖCŲ„╚╦┘| ┴┐×ķ250kg, ╔ĒĖ▀180cm, ┼õéõėą5┼_ššŽÓÖC║═╣®┬Ę╚╦╩╣ė├Ą─Ū¾ų·░┤ŌoĪŻ▓óŪę╦³▀ĆĢ■░l│÷ ę╗ą®║åå╬Ą─ųĖ┴ŅŻ¼└²╚ń䱚]╚╦éā▓╗ę¬į┌Įų╔Žą’ŠŲū╠╩┬Ą╚ĪŻ┤╦═ŌŻ¼╬ęć°¢|▌Ė└Ē╣żīWį║Ą─┤¾ īW╔·ę▓įOėŗ┴╦ę╗éĆ▒Ż░▓č▓▀ēÖCŲ„╚╦Ż¼╚ńłD4.1(g) ╦∙╩ŠĪŻ╦³ęį╠½Ļ¢─▄×ķų„Ż¼ļŖäėąĪ▄ć×ķ▌d ¾wŻ¼▓╔ė├ČÓĘNĖ▀ąį─▄é„ĖąŲ„ūįäėĄžÖz£yšŽĄK╬’║══Ļ│╔ūįäėųĄ╩žĪół¾Š»Ą╚Ė„ĘN▒Ż░▓╚╬äšĪŻ ╦³─▄į┌ąŻł@║═ąĪģ^╝░Ųõ╦¹ŁhŠ│Ž┬═Ļ│╔č▓▀ē▒O┐žŻ¼╗“š▀┼c╣╠Č©▒O┐žįOéõĮM│╔ę╗éĆć└├▄Ą─▒O ┐žŠWĮjĪŻ

2020─Ļ║¾Ż¼ČÓ─ŻæBĖąų¬Īó─Żą═ŅA£y┐žųŲŻ©MPCŻ®╦ŃĘ©Ą╚ĻPµI╝╝ąg═╗ŲŲ’@ų°╠ß╔²ÖCŲ„╚╦─▄┴” ĪŻ└²╚ńŻ¼Į^ė░X30╦─ūŃÖCŲ„╚╦═©▀^Ī░ųŪč▓ŽĄĮyĪ▒īŹ¼FūāļŖšŠ╚½┴„│╠ūįų„č▓ÖzŻ¼£╩┤_ąį│¼95% Ż╗╔Ņ█┌─│öĄō■ųąą─ÖCŲ„╚╦Š½├▄▓┘ū„£╩┤_┬╩▀_98.7% ĪŻ2025─ĻŻ¼╚╦ą╬ÖCŲ„╚╦šąŲĖąĶŪ¾╝żį÷409%Ż¼░▓Ę└ąąśI╝ė╦┘Ž“╝╝ąg├▄╝»ą═▐Dą═ ĪŻ«öŪ░æ¬ė├ęčĖ▓╔wļŖ┴”č▓Öz Īó╬Ż╗»ŲĘą╣┬®Ēææ¬ Īó╚²ŠS┬ōäėč▓▀ē Ą╚Å═ļsł÷Š░Ż¼ą╬│╔Ī░╚╦ÖC╗źčaĪ▒Ą─ą┬ą═╔·«a┴”─Ż╩Į ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



