

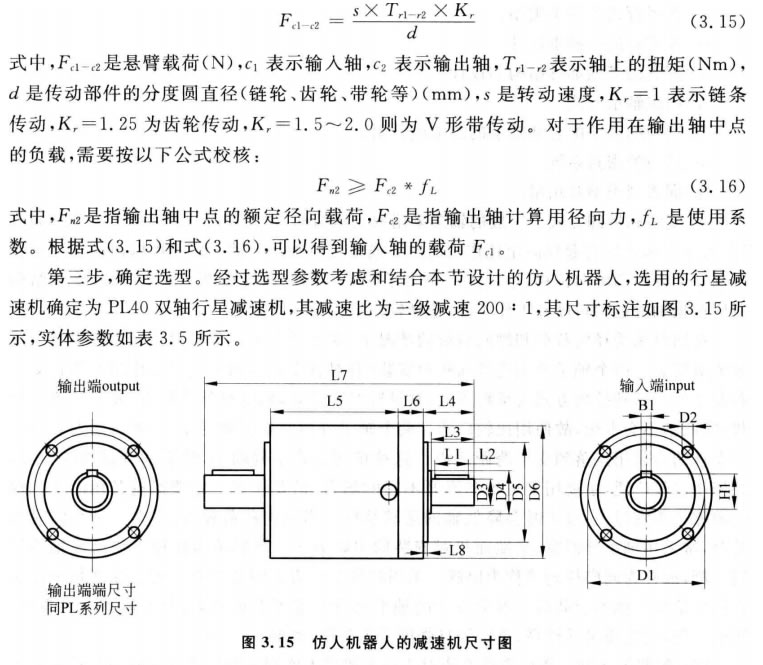
ųŪ─▄Į╗╗źÖCŲ„╚╦▓╗═¼ĻP╣ØĄ─▀\äėąį─▄ąĶŪ¾╩Ū▓╗ę╗śėĄ─ĪŻį┌įOėŗųŪ─▄Į╗╗źÖCŲ„╚╦ĻP╣ØĢrŻ¼ąĶę¬│õĘų┐╝æ]▓╗═¼Ą─▀\äėąĶŪ¾Ż¼įOėŗ│÷╝╚ØMūŃ═©ė├ąįėųĘ¹║Ž╠ž╩ŌąįĄ─ĻP╣ØĪŻ ę╗éĆĻP╣ØīŹļH╩Ū ę╗éĆ▐DäėÖCśŗŻ¼▐DäėÖCśŗų├ė┌▓╗═¼Ą─ū°ś╦ĘĮŽ“╔ŽŻ¼╩╣Ą├įōĻP╣ØŠ▀ėąį┌įōū°ś╦ĘĮŽ“╔ŽĄ─▐D äėĘČć·ĪŻĮY║Ž╔Ž├µĘų╬÷Ą─ĘČć·╝s╩°║═╦┘Č╚╝s╩°Ż¼┐╔ęį┤_Č©ĻP╣ØįOėŗ╦∙ąĶꬥ─▓┐╝■╝░ŲõģóöĄĪŻ▐DäėÖCśŗĄ─įOų├┐╔ęįė╔ęįŽ┬▓┐╝■ĮM│╔ĪŻ
ó┘ų▒┴„╦┼Ę■ļŖÖCŻ¼╦³╩Ū▐DäėÖCśŗĄ─║╦ą─▓┐╝■Ż¼Ųõ╦¹▓┐╝■Č╝╩Ūęįų▒┴„ļŖÖCģóöĄ×ķųąą─ ▀Mąą┼õų├ĪŻļŖÖCĄ─▐Däė╦┘Č╚Īó┼żŠžĪóĘ┤üą┼╠¢Ņl┬╩║═Ņ~Č©ļŖē║Ą╚ģóöĄ╩Ūš¹éĆÖCŲ„╚╦┐žųŲŽĄĮyĄ─øQČ©ąįę“╦žų«ę╗ĪŻ
ó┌£p╦┘ÖC║═£p╦┘²X▌åŻ¼╦³éāų„ę¬ū„ė├╩Ūų▒┴„ļŖÖC┼cųŪ─▄Į╗╗źÖCŲ„╚╦▀\äė╝s╩°Śl╝■ų«ķgĄ─ ś“┴║ĪŻ£p╦┘čbų├┐╔ęįĮĄĄ═ļŖÖCĄ─▐Däė╦┘Č╚Ż¼╝ė┤¾▌ö│÷┼żŠžĪŻ║Ž└ĒĄžįOėŗ£p╦┘▒╚─▄ūī▓╗═¼ ĻP╣ØĄ─▀\äėąĶŪ¾Ą├ĄĮ║▄║├ØMūŃĪŻ
ó█═ė┬▌āxŻ¼ų„ę¬ė├ė┌▐DäėÖCśŗęį╝░ųŪ─▄Į╗╗źÖCŲ„╚╦▀\äė╝ė╦┘Č╚Ą─Ę┤üÖz£yĪŻ╦³─▄║▄║├Ąž Ę┤ė│ųŪ─▄Į╗╗źÖCŲ„╚╦▐DäėĻP╣ØĄ─▀\äėĀŅæB║═ųŪ─▄Į╗╗źÖCŲ„╚╦Ą─▀\äėųžą─Ż¼▀@ī”ė┌ųŪ─▄Į╗╗źÖCŲ„╚╦▓Įąą ╦ŃĘ©įOėŗėąų°ųžę¬Ą─ū„ė├ĪŻ
(1)ų▒┴„╦┼Ę■ļŖÖC▀xō±ĪŻųŪ─▄Į╗╗źÖCŲ„╚╦“īäėŽĄĮyĄ─ļŖÖC│²Š▀ėąę╗░ŃļŖÖCĄ─╗∙▒Š╣”─▄ ═ŌŻ¼ė╔ė┌Ųõ╠ž╩ŌąįŻ¼▀ĆŠ▀ėąŽ┬┴ą╠ž³c╝░ę¬Ū¾[96ĪŻ
ó┘┐╔┐žąįŻ¼“īäėļŖÖC╩Ūīó┐žųŲą┼╠¢▐Dūā×ķÖCąĄ▀\äėĄ─įŁ╝■Ż¼┐╔┐žąįĘŪ│Żųžę¬ĪŻ
ó┌£╩┤_ąįŻ¼ę¬£╩┤_Ąž╩╣ÖCąĄ▀\äėØMūŃąĶŪ¾Ż¼ąĶę¬ę¬Ū¾ļŖÖCŠ▀ėąĖ▀Š½Č╚ĪŻ
ó█┐╔┐┐ąįŻ¼ļŖÖCĄ─┐╔┐┐ąįĻPŽĄĄĮš¹éĆųŪ─▄Į╗╗źÖCŲ„╚╦Ą─┐╔┐┐ąįĪŻ
ó▄┐ņ╦┘ąįŻ¼ųŪ─▄Į╗╗źÖCŲ„╚╦Ą─┐žųŲųĖ┴ŅĮø│Żūā╗»Ż¼ėąą®ūā╗»ĘŪ│ŻčĖ╦┘Ż¼╦∙ęįę¬Ū¾ļŖÖC─▄ū÷ │÷┐ņ╦┘Ą─Ēææ¬ĪŻ
ó▌ĮøØ·ąįŻ¼ĮøØ·ąį╩Ū╚╬║╬╣ż│╠╝╝ągĄ─ę╗éĆųžę¬ųĖś╦Ż¼┐žųŲļŖÖCę▓║┴▓╗└²═ŌŻ¼ørŪę┐žųŲ ļŖÖCį┌ųŪ─▄Į╗╗źÖCŲ„╚╦ųą╦∙š╝ĮøØ·ārųĄ▒╚└²▌^┤¾Ż¼┐žųŲļŖÖCĄ─ĮøØ·ąį’@Ą├ė╚×ķųžę¬ĪŻ
ó▐ŁhŠ│▀mæ¬ąįŻ¼“īäėļŖÖCę¬ėą┴╝║├Ą─ŁhŠ│▀mæ¬ąįŻ¼═∙═∙▒╚ę╗░ŃļŖÖCĄ─ŁhŠ│ę¬Ū¾Ė▀ įSČÓĪŻ
ļŖÖC╩ŪīóļŖ─▄▐D╗»×ķÖCąĄ─▄Ą─▓┐╝■Ż¼ė╔┤╦░l╔·Ą─┴”Įø▀^ęį£p╦┘Ų„×ķ║╦ą─Ą─äė┴”é„▀f ŽĄĮyĄĮ▀_žō▌dČ╦ĪŻį┌┤╦▀^│╠ųąŻ¼ ę╗▓┐Ęų┴”┐╦Ę■─”▓┴Ż¼ęį¤ß─▄Ą─ą╬╩Į║─╔ó│÷╚źŻ¼ę“┤╦é„äėą¦ ┬╩¤oĘ©▀_ĄĮ100%ĪŻį┌īŹļHįOėŗųąŻ¼æ¬įōīó╔Ž╩÷┬ĘŠĆĄ─Ēśą“Ą╣▀^üĒŻ¼╝┤ęįžō▌dĄ─┤¾ąĪ║═─” ▓┴ŽĄöĄ╝░▀\äėą¦┬╩╚ź═Ų╦ŃļŖÖCĄ─╚▌┴┐ĪŻ╩®╝ėė┌ļŖÖCĄ─žō▌d┤¾ų┬┐╔ęįäØĘų│╔╚²ĘN╗∙▒ŠŅÉ ą═Ż║ėąą¦┴”Īó¤oą¦┴”ĪóæTąį┴”ĪŻųŪ─▄Į╗╗źÖCŲ„╚╦Ą─“īäėŲ„┤¾ų┬ėąų▒┴„ļŖÖCĪó▓Į▀MļŖÖCĪóȵÖCĪŻ╚ń łD3.14╦∙╩Š×ķļŖÖC▀xō±Ą─ĘĮĘ©║═▓Į¾EĪŻÅ─łDųą┐╔ų¬Ż¼øQČ©ļŖÖC╚▌┴┐ĢrŻ¼╔µ╝░žō▌d╣└╦ŃĪó “īäėī”Ž¾▀\äėęÄ┬╔┤_Č©Īóé„äėŽĄĮy▐DäėæT┴┐š█╦ŃĄ╚ā╚╚▌[96]ĪŻ
(2)ų▒┴„╦┼Ę■ļŖÖC▀xą═ĪŻĖ∙ō■╔Ž├µĄ─Ęų╬÷Ż¼×ķ▒Š╣ØįOėŗĄ─ųŪ─▄Į╗╗źÖCŲ„╚╦▀xė├┴╦ā╔ĘN ŅÉą═Ą─ų▒┴„╦┼Ę■ļŖÖCŻ¼Ęųäe╩Ū╔Ž║Ż╚┐╦┐Ų╝╝░lš╣ėąŽ▐╣½╦ŠĄ─50SYXB-01 ║═ 5 0SYXB- 02,┘|┴┐┤¾╝s×ķ0.5Ī½1.0kg, ęÄĖ±╚ń▒Ē3.3╦∙╩ŠĪŻÅ─▒Ēųą▓╗ļy┐┤│÷▀@ĘNų▒┴„╦┼Ę■ļŖÖC ▐D╦┘ĘŪ│ŻĖ▀Ż¼ZĖ▀┐╔▀_ĄĮ3000r/min(▐D/ĘųńŖ);Č°Ųõ▐DŠžėų║▄ąĪŻ¼▓╗─▄ų▒Įėė├ė┌ĻP╣Ø“ī äėčbų├ĪŻ

ąĪĪóųž┴┐▌pĪóą¦┬╩Ė▀Ą╚ā׳cĪŻųŪ─▄Į╗╗źÖCŲ„╚╦│Żė├Ą─é„äė║═£p╦┘ÖCśŗ░³└© RV £p╦┘ÖCśŗĪóųC▓© £p╦┘ÖCąĄĪóö[ŠĆßś▌å£p╦┘ÖCśŗĪóąąąŪ²X▌å£p╦┘ÖCśŗĪóØLųķĮzĖ▄ÖCśŗĪó┬▌ą²é„äėÖCśŗĪó═¼▓Į²X ą╬ĦÖCśŗĪŻŽÓī”ė┌Ųõ╦¹£p╦┘ÖCŻ¼ąąąŪ£p╦┘ÖCŠ▀ėąĖ▀äéąįĪóĖ▀Š½Č╚ĪóĖ▀é„äėą¦┬╩ĪóĖ▀┼żŠž/¾w Ęe▒╚ĪóĮK╔Ē├ŌŠSūoĄ╚╠ž³cĪŻę“┤╦Ż¼ąąąŪ£p╦┘ÖCČÓöĄ░▓čbį┌▓Į▀MļŖÖC║═╦┼Ę■ļŖÖC╔ŽŻ¼ė├üĒĮĄ Ą═▐D╦┘║═╠ß╔²┼żŠž╝░Ųź┼õæT┴┐ĪŻąąąŪ£p╦┘ÖCų„ę¬ė╔ąąąŪ▌åĪó╠½Ļ¢▌åĪó═Ō²X╚”śŗ│╔ĪŻ╦³å╬ J£p╦┘ZąĪ×ķ3,Z┤¾▓╗│¼▀^10,£p╦┘ÖCJöĄę╗░Ń▓╗│¼▀^3,Ą½ėą▓┐Ęų┤¾£p╦┘▒╚Č©ųŲĄ─£p ╦┘ÖCėą4J£p╦┘Ż¼£p╦┘ÖCŅ~Č©▌ö╚ļ▐D╦┘ZĖ▀┐╔▀_ĄĮ18000r/m ęį╔ŽŻ¼╣żū„£žČ╚į┌Ī¬25~ 100Īµ,═©▀^Ė─ūāØÖ╗¼ų¼┐╔ęįĖ─ūāŲõ╣żū„£žČ╚ĪŻ▒Š╣ØįOėŗĄ─ųŪ─▄Į╗╗źÖCŲ„╚╦╩╣ė├Ą─ļŖÖCŠ∙╩Ū ╦┼Ę■ļŖÖCŻ¼Č°ąąąŪ£p╦┘ÖC─▄┼c╦┼Ę■ļŖÖC ę╗ Ų╩╣ė├Ż¼╦³╩ŪĮĄĄ═▐D╦┘Īó╠ß╔²┼żŠžĪóŲź┼õæT┴┐Ą─ Z╝č▀xō± ĪŻ
(4)Š½├▄ąąąŪ£p╦┘ÖC▀xą═╝░Ųõå¢Ņ}ĪŻ▀xė├Š½├▄ąąąŪ£p╦┘ÖCæ¬┐╝æ]ŲõĮYśŗŅÉą═Īó░▓čb ą╬╩ĮĪó│ą▌d─▄┴”Īó▌ö│÷▐D╦┘Īó╣żū„Śl╝■Ą╚ę“╦žĪŻ£p╦┘ÖCĄ─│ą▌d─▄┴”╩Ūį┌Ņ~Č©▐D╦┘Ž┬Ż¼├┐╠ņ ╣żū„10ąĪĢr║═åóäėöĄ╔┘ė┌10time/h ╝░ŲĮĘƤoø_ō¶Ą─Śl╝■Ž┬Ą├│÷Ą─Ż¼╦∙ęįæ¬░┤ęįŽ┬▓Į¾E ▀Mąą▀xą═[97]ĪŻ
Ą┌ ę╗ ▓ĮŻ¼Öz▓ķ╦∙▀x┼õų├Ż║
ó┘Ė∙ō■žō▌dŅÉą═║═├┐ąĪĢråó═Ż┤╬öĄ╝░ŅAŲ┌╣żū„ē█├³┤_Č©╩╣ė├ŽĄöĄfsĪŻ


(5)ĻP╣Ø▌S│ąįOėŗĪŻųŪ─▄Į╗╗źÖCŲ„╚╦Ą─ĻP╣Ø▌S│ąę¬Ė∙ō■ųŪ─▄Į╗╗źÖCŲ„╚╦Ą─Ė▀Č╚Īóųž┴┐║═▀\äė ╠žš„üĒįOėŗĪŻ▒Š╣ØįOėŗĄ─ųŪ─▄Į╗╗źÖCŲ„╚╦¾wųž▀_ĄĮ80kg, Å─Č°╩╣Ą├ĻP╣Ø▌S│ąĄ─įOėŗļyČ╚Ė³ ┤¾ĪŻ╠žäeī”ė┌─_§ū║═Žź╔wĄ╚ųžę¬╩▄┴”ĻP╣ØŻ¼Ė³╝ėī”Ųõ╩▄┴”║═─”▓┴ėąų°╠ž╩Ōę¬Ū¾ĪŻę“┤╦Ż¼ ▌S│ąįOėŗąĶę¬┐╝æ]ęįŽ┬ę“╦žĪŻ
ó┘▀xō±║Ž▀mĄ─▌S│ąŅÉą═ĪŻ
ó┌┤_Č©║Ž▀mĄ─▌S│ą│▀┤ńĪŻ
ó█┼õų├Ą─Ųõ╦¹▓┐╝■ĮYśŗ║═įOėŗĪŻ
ó▄╣╠Č©▌S│ąĘĮ╩ĮĪŻ
ó▌▀m«öĄ─╣½▓Ņ┼õ║Ž║═▌S│ąĄ─ė╬ŽČ╗“ŅAŠoĪŻ
ó▐▀m«öĄ─├▄ĘŌŽĄĮyĪŻ
ó▀ØÖ╗¼ä®ŅÉą═║═ė├┴┐ĪŻ
óÓ░▓čb║═▓ąČĘĮ╩ĮĪŻ ę╗░ŃĄ─▌SČÓ▓╔ė├ļpų¦│ąĮYśŗŻ¼▌SĄ─ÅĮŽ“╬╗ų├ė╔ā╔éĆų¦│ą╣▓═¼Ž▐ Č©Ż¼├┐éĆų¦│ą╠Äæ¬ėąŲÅĮŽ“Č©╬╗ū„ė├Ą─Ž“ą─╗“ĮŪĮėė|▌S│ąĪŻ▌SŽ“╬╗ų├┐╔ęįė╔ā╔éĆų¦│ąĖ„ Ž▐ųŲę╗éĆĘĮŽ“Ą─▌SŽ“╬╗ęŲŻ¼ę▓┐╔ė╔ę╗éĆų¦│ąŽ▐ųŲ▓╗═¼Ą─▀\▐DŠ½Č╚ĪŻę“┤╦Ż¼įOėŗų¦│ąĮYśŗ Ģræ¬Ė∙ō■▌SĄ─▀\äėŠ½Č╚║═╣żū„Śl╝■Ż¼▀xō±▌SŽ“Č©╬╗Ą─Š▀¾wĘĮ░ĖĪŻ
į┌═¼Ģr│ą╩▄ÅĮŽ“▌d║╔║═▌SŽ“▌d║╔Ą─ŪķørŽ┬Ż¼ų¦│ą═©│Ż▓╔ė├ĮŪĮėė|▌S│ą║═łAÕFØLūė▌S │ą│╔ī”░▓čbĪŻā╔éĆ▌S│ą═Ō╚”īÆČ╦├µŽÓī”░▓čb(▒│ī”▒│░▓čb),ā╔éĆų¦│ą┴”ū„ė├³c┬õį┌ų¦│ą ┐ńŠÓų«═ŌĪŻ▀@ĘN┼┼┴ąĘĮ╩Įų¦│ą┐ńŠÓ┤¾Ż¼▌Sæę▒█Ģräéąį║├Ż¼▌S╩▄¤ß╔ņķLĢrā╚Īó═Ō╚”│╩├ōķ_┌ģ ä▌Ż¼ę“Č°▌S▓╗Ģ■┐©╦└Ż¼╣╩╩╣ė├▒╚▌^ÅVĘ║ĪŻā╔éĆ▌S│ą═Ō╚”šŁČ╦├µŽÓī”░▓čb(├µī”├µ░▓čb),ā╔ éĆų¦│ąĄ─┴”ū„ė├³c┬õĄĮų¦│ą┐ńŠÓų«ā╚ĪŻ▀@ĘN┼┼┴ąĘĮ╩ĮĮYśŗ║åå╬Ż¼čb▓║═š{įćŠ∙▌^ĘĮ▒ŃŻ¼ ╣╩╩╣ė├ę▓▌^ÅVĘ║Ż¼ų„ę¬ė├ė┌Č╠▌S║═£ž╔²▓╗Ė▀Ą─ł÷║ŽŻ¼Ą½ę¬ūóęŌę╗Č©ę¬┴¶ėąéõė├ė╬ŽČĪŻ▌S Ž“ė╬ŽČę▓▓╗ę╦▀^┤¾Ż¼▀^┤¾ĢrĢ■ĮĄĄ═▌SĄ─▀\▐DŠ½Č╚ĪŻ«ö▌SŽ“▌d║╔▌^┤¾Ż¼ąĶČÓéĆ▌S│ą═¼Ģr│ą ╩▄ĢrŻ¼│Ż▓╔ė├▌S│ą═Ō╚”īÆĪóšŁČ╦├µŽÓī”░▓čbĄ─┤«┬ōĘĮ╩ĮĪŻĖ„▌S│ą┴”ū„ė├³cŠ∙┬õį┌▌S│ąĄ─ ═¼ę╗é╚Ż¼╣╩ĘQ×ķ═¼Ž“┼┼┴ą╗“ĘQ×ķ┤«┬ōĪŻ▓╔ė├┤╦ĘN┼┼┴ąĘĮ╩ĮĢrę¬ūóęŌĮYśŗ╔Ž▒ŻūC├┐éĆ▌S│ą Č╝─▄▒M┴┐Š∙ä“Ąž│ą╩▄▌d║╔ĪŻ▒Š╣ØįOėŗĄ─▌S│ą│õĘų┐╝æ]┴╦╔Ž╩÷ę“╦žŻ¼Š▀ėą▀\äėąį─▄Ė▀Ż¼│ą ē║─▄┴”ÅŖŻ¼┐╔▀mė├ņ`╗ŅąįĖ▀Ż¼ųž┴┐▌pŪęÅŖČ╚Ė▀Ą╚Śl╝■Ż¼╚ńłD3.16╦∙╩ŠĪŻ
(6)═ė┬▌āx▀xą═ĪŻæTąįČ©╬╗ŽĄĮyī”ė┌ųŪ─▄Į╗╗źÖCŲ„╚╦īŹ¼F╬┤ų¬ŁhŠ│Ž┬īŹĢrČ©╬╗Š▀ėą▓╗┐╔ ╠µ┤·Ą─ū„ė├ĪŻ═ė┬▌āx╩ŪæTąįČ©╬╗ŽĄĮyųąų„ę¬Ų„╝■ų«ę╗Ż¼╦³Ą─ąį─▄║├ē─ų▒Įėė░ĒæųŪ─▄Į╗╗źÖCŲ„╚╦Ą─Č©╬╗Š½Č╚ĪŻ═ė┬▌āxĘNŅÉĘ▒ČÓŻ¼└²╚ńŻ¼ėąę║ĖĪ═ė┬▌āxĪóņoļŖ═ė┬▌āxĪóäė┴”š{ųC═ė┬▌āxĪó╝ż ╣Ō═ė┬▌āx║═╣Ō└w═ė┬▌āxĄ╚ĪŻ╣Ō└w═ė┬▌āx░┤įŁ└Ēėų┐╔ęįĘų×ķĖ╔╔µą═║═ųCš±Ū╗ą═Ż╗░┤ĮYśŗ┐╔ ęįĘų×ķĘų┴óį¬╝■ą═Īó╚½╣Ō└wą═║═╝»│╔╣ŌīWą═Ż╗░┤£y┴┐ĘĮ╩Į┐╔ęįĘų×ķķ_Łhą═║═ķ]Łhą═Ą╚ĪŻ Ė╔╔µą═ęčĮø░lš╣ĄĮ┴╦▀mė├ļAČ╬Ż¼░lš╣Z┐ņĄ─╩Ū╚½╣Ō└wą═║═╝»│╔╣ŌīWą═Ż¼╝»│╔ą═╩Ū░lš╣ĘĮ Ž“Ż¼ųCš±Ū╗ą═─┐Ū░š²╠Äį┌īŹ“×ļAČ╬ĪŻū„×ķųŪ─▄Į╗╗źÖCŲ„╚╦Ą─īŹ“×ŲĮ┼_Ż¼Ų„╝■Š½Č╚║═┐╔┐┐ąį▓ó ▓╗ę¬Ū¾┐┴┐╠Ż¼Ė∙ō■īŹļHŪķør┐╔ęį▀xō± Xsens ╣½╦ŠĄ─MTI AHRSĪŻ
įō═ė┬▌āx╩Ūę╗éĆ╬óą═£y ┴┐ū╦æB║═║ĮŽ“ŽĄĮy(AHRS) ĪŻ ╦³Ą─ā╚▓┐ą┼╠¢╠Ä└ĒŲ„╣”║─Ą═Ż¼▌ö│÷Ą─║ĮŽ“ĮŪø]ėąŲ»ęŲŻ¼═¼ Ģr╠ß╣®Įø▀^ąŻ£╩Ą─3D╝ė╦┘Č╚Īó3D ĮŪ╦┘Č╚ęį╝░3D ┤┼ł÷ÅŖČ╚ĪŻŲõ╠ž³c╩Ū360ĪŃ╚½ĘĮ╬╗▌ö│÷ (ū╦æB║═║ĮŽ“),ķLĢrķgĘĆČ©ąį║═┐ņ╦┘äėæBĒæ欎ÓĮY║ŽŻ¼▌ö│÷╚²▌S╝ė╦┘Č╚Īó╚²▌SĮŪ╦┘Č╚║═╚² ▌SĄž┤┼ł÷ÅŖČ╚Ż¼╚½╣╠æB╬óą═MEMS æTąįŲ„╝■ĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



