

į┌▀^(gu©░)╚źĄ─10─ĻųąŻ¼ęčĮø(j©®ng)š╣╩Š┴╦Ė„ĘNŅÉ(l©©i)ą═Ą─│╔╣”Ą─ļp═╚ÖC(j©®)Ų„╚╦ĪŻęčĮø(j©®ng)ūC├„ļp═╚ÖC(j©®) Ų„╚╦─▄┼▄Īó╠°║═╔ŽŽ┬śŪ╠▌ąąū▀Ż¼╔§ų┴═µ┐šųą░čæ“Ż¼╚ńĘŁĮŅČĘĪŻį┌╔╠śI(y©©)▓┐ķT(m©”n)Ż¼▒Š╠’║═╦„─ß ╣½╦Šį┌▀^(gu©░)╚ź10─ĻęčĮø(j©®ng)ū÷│÷┴╦ųž┤¾Ą─▀M(j©¼n)š╣Ż¼▓óī”(du©¼)ļp─_ÖC(j©®)Ų„╚╦┘xėĶ║▄Ė▀Ą─╣”─▄ĪŻā╔éĆ(g©©)╣½ ╦ŠįO(sh©©)ėŗ(j©¼)┴╦ąĪą═Īóėąį┤Ą─ĻP(gu©Īn)╣Ø(ji©”)Ż¼īŹ(sh©¬)¼F(xi©żn)┴╦¼F(xi©żn)ėą╔╠śI(y©©)╦┼Ę■ÖC(j©®)┬ä╦∙╬┤┬äĄ─╣”┬╩/ųž┴┐ąį─▄ųĖś╦(bi©Īo)ĪŻ ▀@ą®ą┬Ą─Ī░ųŪ─▄Ī▒╦┼Ę■ÖC(j©®)Ż¼▓╗āH╠ß╣®┴╦ÅŖ(qi©óng)┤¾Ą─╝żäŅ(l©¼)Ż¼Č°Ūęė├▐D(zhu©Żn)ŠžĖąų¬║═ķ]Łh(hu©ón)┐žųŲĘĮĘ©╠ß ╣®┴╦▀mÅ─Ą─╝żäŅ(l©¼)ĪŻ
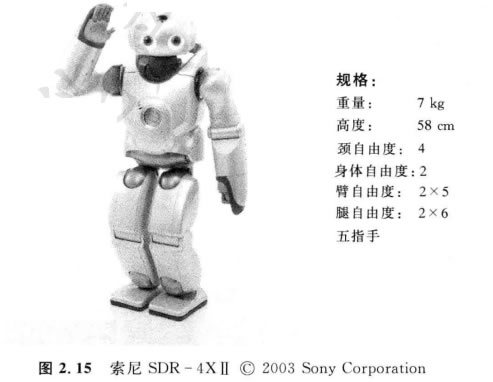
╦„─ßē¶(m©©ng)ŽļÖC(j©®)Ų„╚╦Ż¼╝┤SDR-4X ó“─Żą═Ż¼╚ńłD2.15╦∙╩ŠĪŻ▀@éĆ(g©©)┴„ąąĄ──Żą═╩Ū1997 ─Ļķ_(k©Īi)╩╝Ą─蹊┐ĮY(ji©”)╣¹Ż¼╦³ęį▀\(y©┤n)äė(d©░ng)▒Ēč▌║═Į╗ļHŖ╩śĘ(l©©)(╚ń╠°╬Ķ║═│¬ĖĶ)×ķ╗∙▒Š─┐Ą─ĪŻ▀@éĆ(g©©)Š▀ ėą38éĆ(g©©)ūįė╔Č╚Ą─ÖC(j©®)Ų„╚╦Ż¼×ķ┴╦┬Ģ궥─Š½╝Ü(x©¼)Č©Ž“Īó╗∙ė┌łDŽ±Ą─╚╦åTūR(sh©¬)äeĪóå╬░Õ╬óą═┴ó¾w Š░╔ŅłDĄ─ųžśŗ(g©░u)ęį╝░ėąŽ▐Ą─šZ(y©│)ę¶ūR(sh©¬)äeŻ¼čbėą7éĆ(g©©)¹£┐╦’L(f©źng)ĪŻĮoČ©┴╦┴„├Į¾w║═Ŗ╩śĘ(l©©)▀\(y©┤n)äė(d©░ng)Ą─ ─┐ś╦(bi©Īo)Ż¼╦„─ß╣½╦Š╗©┘M(f©©i)┴╦Š▐┤¾Ą─Š½┴”įO(sh©©)ėŗ(j©¼)┴╦▀\(y©┤n)äė(d©░ng)Ą─įŁą═æ¬(y©®ng)ė├ŽĄĮy(t©»ng)Ż¼╦³─▄╩╣╦¹éāĄ─╣ż│╠Ĥ ęį║å(ji©Żn)Į▌Ą─ĘĮ╩ĮŠÄ┼┼╬ĶĄĖĪŻę¬ūóęŌĄ─╩ŪŻ¼SDR-4XI ▒╚▌^ąĪŻ¼šŠ┴ó58cm, ųž┴┐?j©®)H6.5kgĪŻ
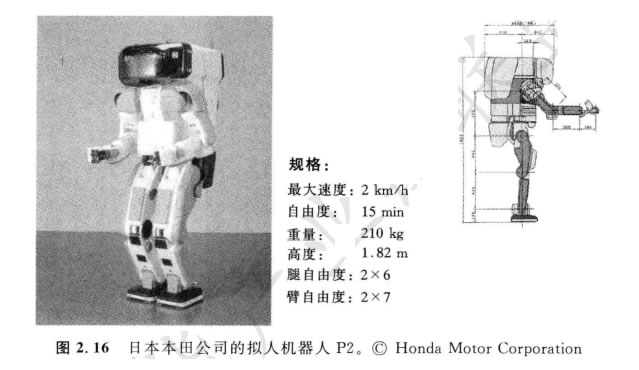
▒Š╠’╣½╦ŠĄ─öM╚╦ÖC(j©®)Ų„╚╦ĒŚ(xi©żng)─┐ėąų°ųĄĄ├ūóęŌĄ─░l(f©Ī)š╣Įø(j©®ng)ÜvĪŻĄ½╩Ū┤╦═ŌŻ¼╦³▀ĆūźūĪ┴╦ ╝żäŅ(l©¼)Ą─ĘŪ│Żųžę¬Ą─╣ż│╠╠¶æ(zh©żn)ĪŻłD2.16š╣╩Š┴╦─Żą═ P2, ╦³╩ŪZą┬─Żą═ Asimo (į┌░l(f©Ī)├„ ęŲäė(d©░ng)ąįųąėą│¼Ū░▓ĮĘź)Zų▒ĮėĄ─Ž╚“ī(q©▒)ĪŻūóęŌŻ¼Zą┬Ą─▒Š╠’ Asimo ─Żą═╚į╚╗▒╚ SDR- 4X I┤¾Ą├ČÓŻ¼Ė▀120 cm, ųž52 kg ĪŻ▀@┐╔į┌▒Ż│ų▓╗╬ŻļU(xi©Żn)│▀┤ń║═ū╦ä▌(sh©¼)Ą─═¼Ģr(sh©¬)Ż¼─▄į┌ėąśŪ ╠▌║═┼_(t©ói)ļAĄ─╚╦ŅÉ(l©©i)Łh(hu©ón)Š│ųąŠ▀ėąīŹ(sh©¬)ė├Ą─ÖC(j©®)äė(d©░ng)ąįĪŻę▓įS▀@╩Ūš╣╩ŠĘ┬╔·Ą─ļp─_╔ŽŽ┬śŪ╠▌Ą─Ą┌ ę╗éĆ(g©©)ÖC(j©®)Ų„╚╦ĪŻ▀@ą®▒Š╠’öM╚╦ŽĄ┴ąĄ─ÖC(j©®)Ų„╚╦▓╗╩ŪīŻ(zhu©Īn)ķT(m©”n)×ķŖ╩śĘ(l©©)─┐Ą─Č°įO(sh©©)ėŗ(j©¼)Ż¼Č°╩Ūū„×ķš¹ éĆ(g©©)╔ńĢ■(hu©¼)Ą─╚╦ŅÉ(l©©i)Ä═╩ųČ°įO(sh©©)ėŗ(j©¼)ĪŻ└²╚ńŻ¼▒Š╠’╣½╦Š░čAsimo Ą─Ė▀Č╚«ö(d©Īng)ū„ÖC(j©®)Ų„╚╦─▄ī”(du©¼)╚╦ŅÉ(l©©i)Łh(hu©ón) Š│▀M(j©¼n)ąą╣▄└Ē▓┘ū„(╚ń┐žųŲ¤¶ķ_(k©Īi)ĻP(gu©Īn))Ą─ZąĪĖ▀Č╚ĪŻ
ļp─_ÖC(j©®)Ų„╚╦ę╗éĆ(g©©)ųžę¬Ą─╠žš„╩Ū╦³éāŠ▀ėąŅÉ(l©©i)╦Ų╚╦Ą─═Ōą╬ĪŻ╦³éā┐╔ęį▒╗ųŲįņ│╔║═╚╦ ŽÓĮ³╦ŲĄ─│▀┤ńŻ¼▀@╩╣Ą├╦³éā?c©©)┌╚╦ÖC(j©®)Į╗╗źĄ─蹊┐ųą│╔×ķ│÷╔½Ą─▀\(y©┤n)▌d╣żŠ▀ĪŻ╚š▒ŠįńĄŠ╠’ ┤¾īW(xu©”)ųŲįņĄ─WABIAN-2R (łD2.17)š²╩Ūū„▀@ĘN蹊┐Ą─[255]ĪŻWABIAN-2R ▒╗įO(sh©©)ėŗ(j©¼) │╔─▄ē“─ŻĘ┬╚╦Ą─▀\(y©┤n)äė(d©░ng) Ż¼ ▓ó╔§ų┴įO(sh©©)ėŗ(j©¼)│╔─▄ē“Ž±╚╦ę╗śė╠°╬Ķ ĪŻ
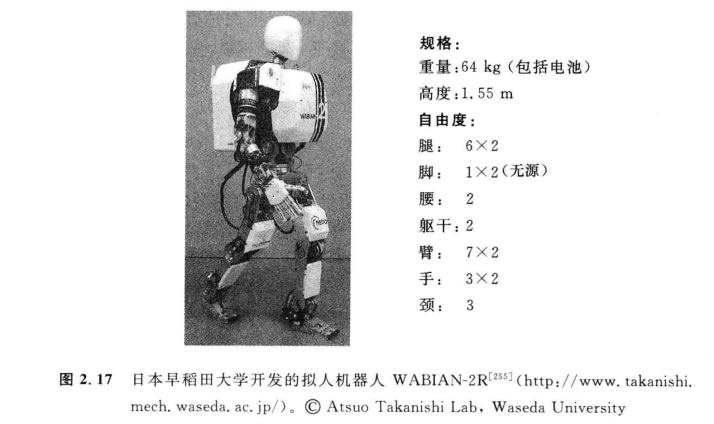
ļp─_ÖC(j©®)Ų„╚╦ų╗─▄į┌─│ą®Ž▐ųŲā╚(n©©i)ņoæB(t©żi)ĄžĘĆ(w©¦n)Č©ĪŻę“┤╦Ż¼Ž±P2 ║═WABIAN-2R ▀@śėĄ─ ÖC(j©®)Ų„╚╦╝┤╩╣šŠų°▓╗äė(d©░ng)Ż¼═©│Żę▓ąĶę¬▀B└m(x©┤)Ąž▀M(j©¼n)ąą╦┼Ę■ŲĮ║ŌąŻš²ĪŻČ°ŪęŻ¼Ė„Śl═╚Č╝ąĶę¬ėąūŃ ē“Ą─╚▌┴┐ęįų¦ō╬ÖC(j©®)Ų„╚╦╚½▓┐ųž┴┐ĪŻį┌╦─═╚ÖC(j©®)Ų„╚╦ŪķørŽ┬Ż¼ŲĮ║Ōå¢(w©©n)Ņ}ļSĖ„Śl═╚╔ŽĄ─žō(f©┤)║╔ ąĶŪ¾Č°ūāĄ├╚▌ęūĮŌøQĪŻļp═╚ÖC(j©®)Ų„╚╦Ą─ ę╗éĆ(g©©) │÷╔½įO(sh©©)ėŗ(j©¼)╩Ū┬ķ╩Ī└Ē╣żīW(xu©”)į║įO(sh©©)ėŗ(j©¼)Ą─Spring Fla- mingo (łD2. 18)ĪŻ▀@éĆ(g©©)ÖC(j©®)Ų„╚╦┼c═╚╝żäŅ(l©¼)Ų„ŽÓ▀BŻ¼▓Õ╚ļ┴╦ÅŚ╗╔Ż¼īŹ(sh©¬)¼F(xi©żn)Ė³ėąÅŚąįĄ─▓ĮæB(t©żi)ĪŻ═©▀^(gu©░)┼cŽ▐ųŲŽź╔wĻP(gu©Īn)╣Ø(ji©”)ĮŪČ╚Ą─Ī░Žź╔w╣ŪĪ▒ŽÓĮY(ji©”)║ŽŻ¼F(xi©żn)lamingo īŹ(sh©¬)¼F(xi©żn)┴╦¾@╚╦Ą─Ę┬╔·▀\(y©┤n)äė(d©░ng)ĪŻ

 |
| ╔╠ė├ÖC(j©®)Ų„╚╦ Disinfection Robot š╣ÅdÖC(j©®)Ų„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ėŁ┘eÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)ÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ųvĮŌÖC(j©®)Ų„╚╦ ūŽ═ŌŠĆ(xi©żn)Ž¹ČŠÖC(j©®)Ų„╚╦ ┤¾Ų┴ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®)Ų„╚╦ Ę■äš(w©┤)ÖC(j©®)Ų„╚╦Ąū▒P(p©ón) ųŪ─▄╦═▓═ÖC(j©®)Ų„╚╦ ņF╗»Ž¹ČŠÖC(j©®) ÖC(j©®)Ų„╚╦OEM┤·╣żÅS Ž¹ČŠÖC(j©®)Ų„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖC(j©®)Ų„╚╦ łDĢ°(sh©▒)^ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ę²ÖC(j©®)Ų„╚╦ ęŲäė(d©░ng)Ž¹ČŠÖC(j©®)Ų„╚╦ ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ ėŁ┘eĮė┤²ÖC(j©®)Ų„╚╦ Ū░┼_(t©ói)ÖC(j©®)Ų„╚╦ ī¦(d©Żo)ė[ÖC(j©®)Ų„╚╦ ŠŲĄĻ╦═╬’ÖC(j©®)Ų„╚╦ įŲ█E┐Ų╝╝ØÖ(r©┤n)ÖC(j©®)Ų„╚╦ įŲ█EŠŲĄĻÖC(j©®)Ų„╚╦ ųŪ─▄ī¦(d©Żo)į\ÖC(j©®)Ų„╚╦ |



